Matlab Toolbox - Antenna
ReplicatedSubarray
|
RSA_Basic_01.m |
|
c = 3e8; % propagation speed fc = 26e9; % carrier frequency lambda = c/fc; % wavelength
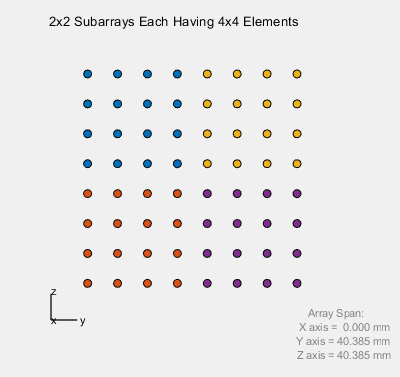
txSubarray = phased.URA('Size',[4 4],'ElementSpacing',[lambda/2 lambda/2]); txSubarray.Element.BackBaffled = true;
txReplicatedURA = phased.ReplicatedSubarray('Subarray',txSubarray,... 'Layout','Rectangular',... 'GridSize',[2 2],... 'GridSpacing',4.0*lambda/2,... 'SubarraySteering','Phase',... 'PhaseShifterFrequency',fc);
viewArray(txReplicatedURA,'Title','2x2 Subarrays Each Having 4x4 Elements');
|
|
'GridSpacing',4.0*lambda/2 |
|
|
|
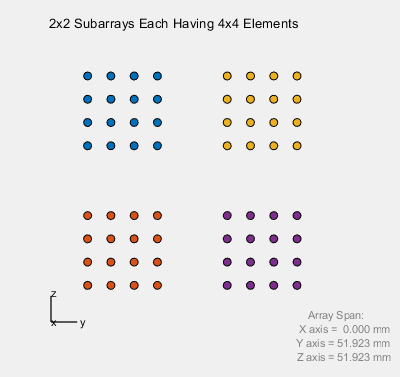
'GridSpacing',6.0*lambda/2 |
|
|
|
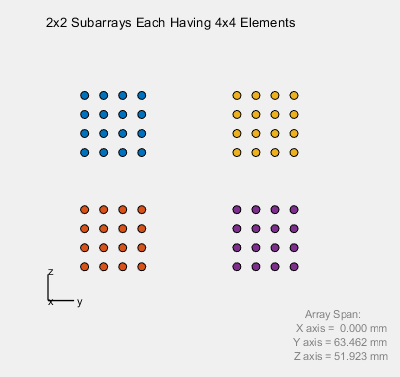
'GridSpacing',[6.0*lambda/2,8.0*lambda/2] |
|
|
|
RSA_Basic_02.m |
|
c = 3e8; % propagation speed fc = 26e9; % carrier frequency lambda = c/fc; % wavelength
txSubarray = phased.URA('Size',[4 4],'ElementSpacing',[lambda/2 lambda/2]); txSubarray.Element.BackBaffled = true;
txReplicatedURA = phased.ReplicatedSubarray('Subarray',txSubarray,... 'Layout','Rectangular',... 'GridSize',[2 2],... 'GridSpacing',4.0*lambda/2,... 'SubarraySteering','Phase',... 'PhaseShifterFrequency',fc);
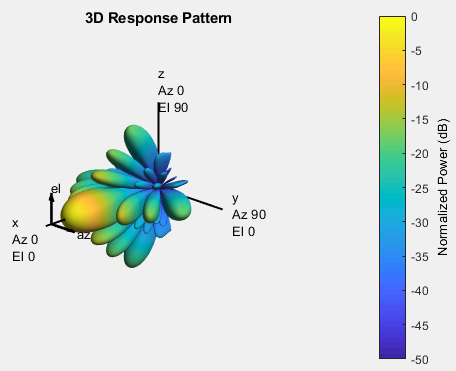
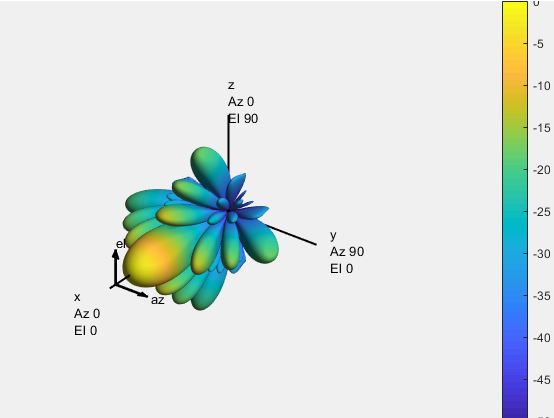
pattern(txReplicatedURA,fc,[-180:180],[-90:90],... 'PropagationSpeed',c,... 'CoordinateSystem','polar',... 'Type','powerdB')
|
|
'GridSpacing',4.0*lambda/2 |
|
|
|
RSA_Basic_03.m |
|
c = 3e8; % propagation speed fc = 26e9; % carrier frequency lambda = c/fc; % wavelength
txSubarray = phased.URA('Size',[4 4],'ElementSpacing',[lambda/2 lambda/2]); txSubarray.Element.BackBaffled = true;
txReplicatedURA = phased.ReplicatedSubarray('Subarray',txSubarray,... 'Layout','Rectangular',... 'GridSize',[2 2],... 'GridSpacing',4.0*lambda/2,... 'SubarraySteering','Phase',... 'PhaseShifterFrequency',fc); steer_ang = [0;0]; sv_array = phased.SteeringVector('SensorArray',txReplicatedURA,... 'PropagationSpeed',c);
wts_array = sv_array(fc,steer_ang);
viewArray(txReplicatedURA,'Title','2x2 Subarrays Each Having 4x4 Elements');
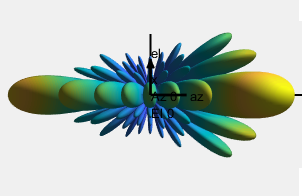
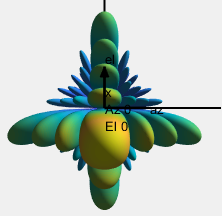
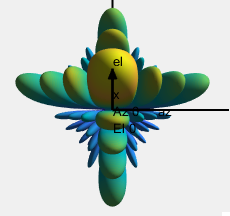
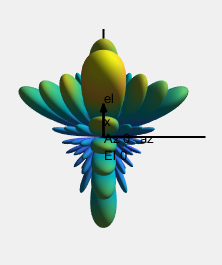
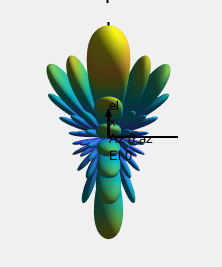
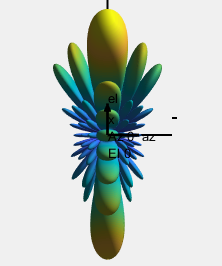
pattern(txReplicatedURA,fc,[-180:180],[-90:90],... 'PropagationSpeed',c,... 'CoordinateSystem','polar',... 'Type','powerdB',... 'Weights',wts_array,... 'SteerAngle',steer_ang)
view(90+37.5,30);
|
|
steer_ang = [0;0]; view(90+37.5,30); |
|
|
|
steer_ang = [-15;0]; view(90,0); |
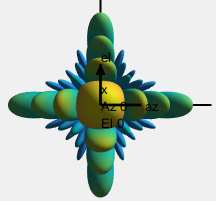
steer_ang = [0;0]; view(90,0); |
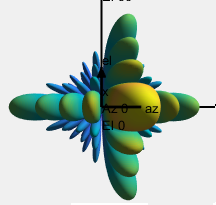
steer_ang = [15;0]; view(90,0); |
|
|
|
|

|
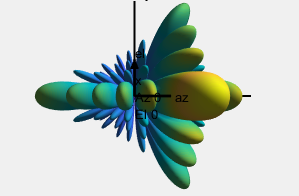
steer_ang = [30;0]; view(90,0); |
steer_ang = [60;0]; view(90,0); |
|
|
|
|
steer_ang = [0;-15]; view(90,0); |
steer_ang = [0;0]; view(90,0); |
steer_ang = [0;15]; view(90,0); |
|
|
|
|
|
steer_ang = [0;30]; view(90,0); |
steer_ang = [0;45]; view(90,0); |
steer_ang = [0;60]; view(90,0); |
|
|
|
|
Disclaimer ! :
This page is only to show you the overall logics and visualization for various Phase Array Antenna System. I haven't investigated much about verifying about the accuracy.
If you think the code is not so efficient, it is 100% my fault. I haven't made any effort for effiecient code. I just tried to create code as simple as possible for the readers. As you know, easy-to-read code is not always efficient for a specific chipset.
If you find any mistake in terms of accuracy, it is also very highly likely be my fault. Not the problem of Matlab tool box itself.
Any comment and corrections if you find any mistake will be welcome and appreciated.